声波探测是人类感知环境和信息交互的基本方式,其中水声波是最有效的一种可以携带信息并在水下长距离传播的波,因此,水声探测在海洋安全、海上救援、海洋生态保护和渔业发展等方面具有重要意义。相位敏感光时域反射计(φ-otdr)作为近年来发展的水声探测新技术,基于脉冲内瑞利后向散射(rbs)的干涉效应,可以定量解调光纤轴上每个位置的声波信息,具备大规模组网能力、灵活的阵列重构、均匀的湿端结构等优点,有望满足先进水声探测的发展需要。然而,在实际应用中,水声目标通常是多类型的,如船只、潜水员、生物等,若φ-otdr在嘈杂环境下对弱信号的探测能力,即动态范围不足,会导致目标相位信息失真,难高保真地获取各类目标的水声特征并区分目标类型。因此,需要提升φ-otdr动态范围,以适应水下多样目标的探测及鉴别需求。
研究背景
φ-otdr系统使用基于正交i/q或hilbert变换的相位解调方法,得到的相位卷绕在(-π,π
范围内,因此需要引入相位解卷绕以恢复实际相位信号。然而,由于系统最大可探测相位的值为π,当存在相位尖峰或强烈的背景环境干扰时,动态范围不足会使相位展开引入额外的相位跳变,导致进一步的失真。
系统的动态范围受问询光脉冲的重复频率fs制约,想要提升动态范围,就需要提升fs。然而,提升fs又会牺牲最大可探测的光纤长度。动态范围即系统可检测的最大相位信号与最小相位信号的比值。其中,可探测的最小相位信号一般由系统噪声水平决定,而最大可探测相位信号与系统解调方法有关。因此,为了高保真获取目标信息和特征分析,需要提高φ-otdr系统的重复频率或动态范围以恢复准确相位。
主要内容
1. 时空二维kalman滤波
φ-otdr系统采集到的相位信号δφ(z,t)是空间域和时间域构成的二维数组,具有空间和时间两个维度上的连续特性,因此建立了基于φ-otdr技术的光纤分布式声波传感系统的二维kalman滤波模型以提升相位解卷绕性能,滤波方向如图1所示。分别从空间维度和时间维度分别独立进行一维kalman滤波,得到z=r-1位置,t=k时刻的相位最优估计值,和z=r位置,t=k-1时刻的相位最优估计值。然后,求出空间维度和时间维度预测值的权重来减少噪声和快变信号的影响,将两个维度的权重并进行加权融合,从而得到最终的滤波结果。
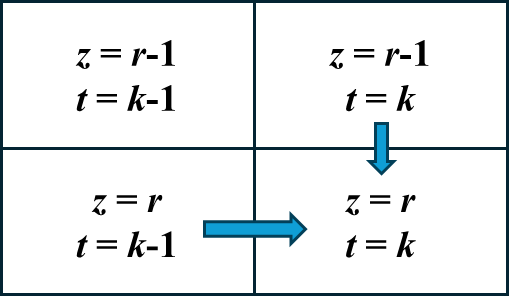
图1 二维kalman滤波器算法的滤波方向
2. 水声多类型目标探测
利用频率分集的φ-otdr系统与悬浮布设的声敏缆在非消声水池(环境噪声水平-66db/hz)开展水声目标探测实验,待测目标为水下机器人rov、仿生鱼和模拟潜水员。
2.1 时空二维kalman解卷绕效果验证
图2是分别利用常规解卷绕、一维kalman和时空二维kalman解卷绕算犯法对一组rov信号的相位解调结果。可以看出,rov信号非常强,常规的解卷绕方法会导致相位结果出现跳变;一维kalman只利用了相位时间域上的连续特性,不能完全恢复出真实信号;而时空二维kalman通过时间域和空间域上的相位连续特性高保真地还原出了rov信号。
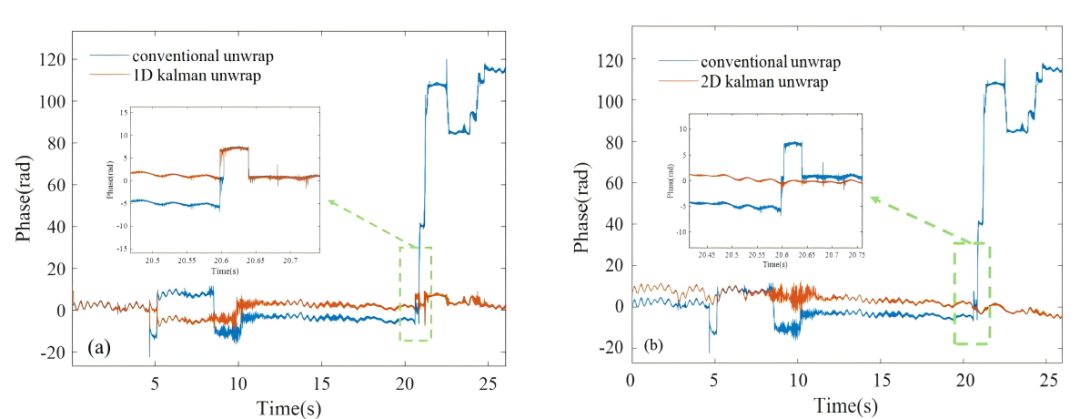
图2 rov信号使用常规解卷绕与(a)一维kalman和(b)时空二维kalman解卷绕的结果对比
2.2 rov
实验中,rov于非消声水池作业深度1m,沿缆由远端到近端再回远端行驶。图3(a)给出了50m位置处rov的语谱图,可以看到rov属于连续不间断的信号,主要覆盖频段为200~1700hz,在4s附近存在多普勒频移。图3(b)给出了rov的运动轨迹,探测结果与真实运动路径相符,在60m开往40m范围内,rov速度约为0.18m/s;在40m开往70m范围内,rov速度约为0.35m/s。图3(c)给出了rov(蓝色曲线)与非消声水池环境噪声(红色曲线)的功率谱密度(psd)对比图,rov的功率谱由多条线谱组成,频率间隔约为24hz,与行驶状态和机械工况有关。
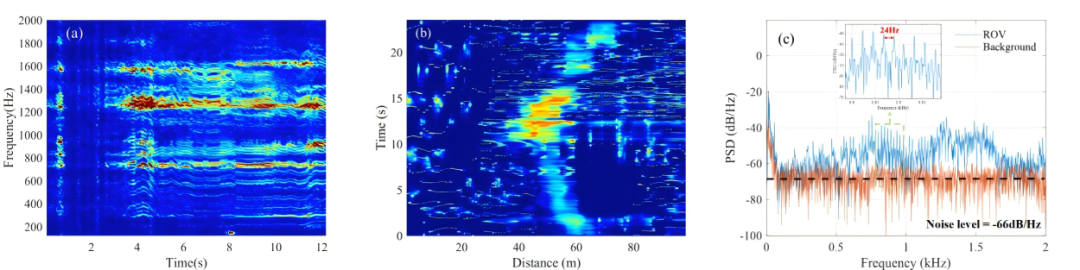
图3 (a) rov语谱图;(b) rov的运动轨迹;(c) rov与环境噪声的psd对比
2.3 仿生鱼
设定仿生鱼摆尾周期为0.5s,控制其在水面沿缆方向由近端向远端移动。图3(a)给出了仿生鱼运动的轨迹图,从图中可以看到所得轨迹与真实运动路径相符,而且可以获取其运行速度,约为0.16m/s。图3(b)给出了仿生鱼的语谱图,在0~2.5s内,仿生鱼的信号频率主要集中在1500~1700hz范围内。此外,信号存在多个极大值点,时间间隔约为0.5s,这一时间间隔与仿生鱼所设定的鱼尾摆动周期一致。
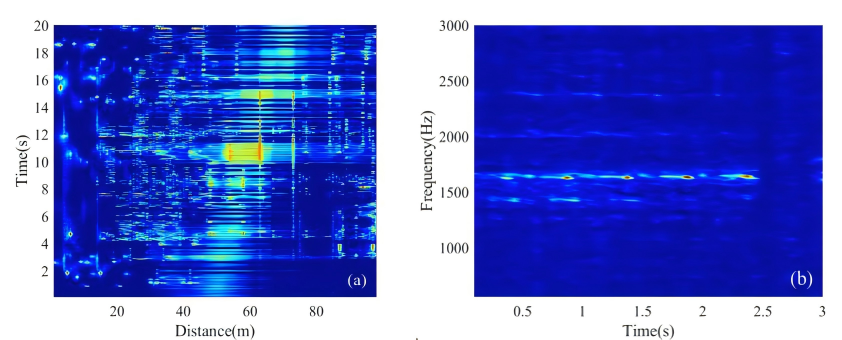
图3 (a) 仿生鱼运动轨迹;(b) 语谱图
2.4 模拟潜水员
实验中,利用氧气瓶进行模拟潜水员试验。图4显示了氧气瓶信号随时间的变化。可以看出,模拟潜水员信号以大约0.25s等间隔排列,对应氧气瓶气泡喷吐周期。此外,气泡信号的主频集中在150~400hz之间。
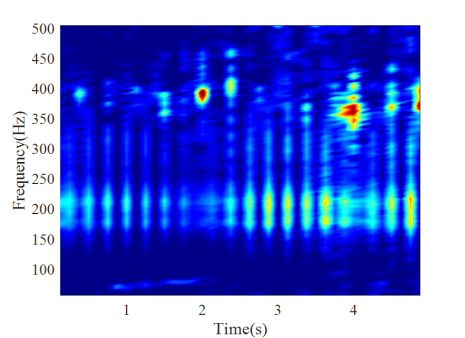
图4 氧气瓶气泡信号语谱图
结论
该工作充分利用φ-otdr探测数据的时间域和空间域的二维连续性,创新性地引入了时空二维kalman算法,可以有效地突破相位卷绕特性对动态范围与重复频率的限制。为了验证该方法在实际水声探测领域的可行性,将频率分集的φ-otdr系统与悬浮布设的声敏缆相结合,检测和分析了多类型目标的水声信号。结果表明,时空二维kalman算法可以高保真地还原rov、仿生鱼和模拟潜水员的频谱特性。该工作基于多类型目标水声特性,可以进一步推动海洋目标分类识别的发展。
作者介绍
王照勇,中国科学院上海光机所副研究员,硕士生导师,中国科学院青促会成员。主要从事分布式光纤传感及应用基础研究,在海洋水声探测、分布式地震波监测、铁路沿线安全监测、结构无损探伤等领域开展深入工作。近五年,以第一/通讯作者在opt. lett.、opt. express、j lightwave technol等期刊发表论文十余篇,授权发明专利8项。部分成果得到laser focus world等媒体的报道。
叶青,中国科学院上海光学精密机械研究所研究员/博士生导师、中国科学院公共安全领域专家组成员、中国科学院上海光学精密机械研究所光纤传感领域学科带头人。主要从事分布式光纤传感及应用系统技术研究。
吴金懿,中国科学院上海光机所博士研究生,主要研究方向为小型化分布式光纤水声探测关键技术及应用研究,参与院重点部署项目、国家重点研发计划等多个项目。
文章信息
吴金懿, 王照勇, 刘依凡, 等. 时空二维kalman解卷绕与φ-otdr协同的水声多目标探测(特邀).红外与激光工程, 2025, 54(4): 20250082. doi: 10.3788/irla20250082
全文链接:http://irla.cn/article/doi/10.3788/irla20250082(阅读原文)